研究内容 . |
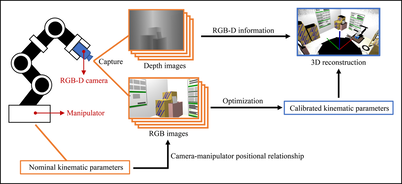
Gaphical abstract of SKCLAM
|
2018〜2021:SLAM 統合機構キャリブレーション (SKCLAM)
SLAM 統合機構キャリブレーション (SKCLAM) 移動ロボットに用いられる SLAM (Simultaneous Localization and Mapping) 技術を固定マ ニピュレータに適用することで,マニピュレータの周囲環境の地図を作成すると同時に,運動学パラメータのキャリブレーションを行うことが可能になる.我々はこれを SKCLAM (Simultaneous Kinematic Calibration, Localization and Mapping) と称して研究を行っている. マニピュレータ手先に搭載した RGB-D カメラを利用して,地図作成と機構キャリブ レーションが可能であることを仮想環境や実環境で確認している. |
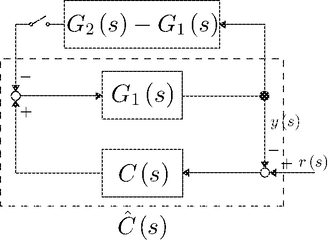
The relationship betweem simultaneously
stabilizing control C(s) and the strongly stabilizing
controller C^ (s)
|
2016〜2018:ロバストサーボ特性をもつ同時安定化補償器に関する研究
この研究は,制御対象の一部が故障したとしても制御系の安定性を保証する同時安定化問題に関する研究である.これまでの同時安定化補償器の設計法を用いると,ステップ目標入力に定常偏差なく追従させる制御系を構築できないという問題が存在する.この問題を解決する同時安定化補償器の設計法を提案している.さらに,同時安定化補償器のパラメータ表現を行う同時安定化補償器のパラメトリゼーションを明らかにしている. |
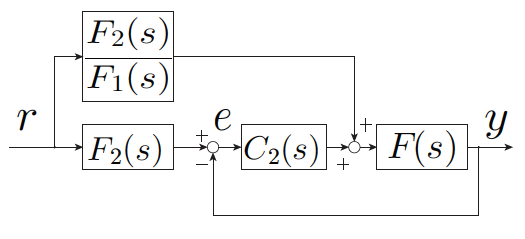
Double two-degree-of-freedom feedback control system
|
2015〜2016:多重フィードバックを用いた最小位相系に対する低感度でロバスト安定な制御系に関する研究
低感度な制御系を設計すると,不確かさが出力に与える影響を小さくし,外乱抑制特性にも優れていることが明らかにされている.しかし,低感度にすると,ロバスト安定性に問題があることも指摘されている.この研究は,最小位相系に対し,多重フィードバックを用いて,低感度でロバスト安定性な制御系の設計問題を検討する. |
